您现在的位置::首页 > 资讯管理 > 行业要闻 > 事件聚焦
车联网在国外起步较早,尤其是汽车销售出口大国很早就已起步,日本*早在1960年左右就开始研究V2V(汽车之间的通信技术),欧美*在2000年前后也在研究,我国在2009年也开展了车路协同的研究项目,也就是说目前我国真正开始研究车联网才10年时间,从技术成熟曲线来说,车联网已经过了“过热期”和“炒作期”。2014年,4G到来后进入了“移动互联网时代”,随后2014-2017年车联网发展进入了谷底。
随着人们对5G商用日渐期待,特别是5G为车联网等关键应用领域而开发的“低时延、高可靠”技术标准已经深入人心,伴随2016年人工智能技术热潮,人们对智能网联汽车又充满了兴趣,各主要省市纷纷开启智能网联汽车测试,但是无论是车联网还是智能网联汽车的研究,目前来说依然面临核心技术主线不明确的问题,而这个核心技术路线就是安全。
安全是智能网联汽车的本质
每个产业的发展都有其目标,智能网联汽车产业也不例外,车辆是人类自工业化开始*基本的交通工具,它*核心的要素就是安全。本文所述的车辆主要是指公路交通工具,以各种动力的汽车为主,英语称其为“vehicle”,“car”意思是小汽车,多指载人的小汽车或轿车,也包括车用大中小型巴士车、观光车等。“vehicle”意思是车辆,交通工具,泛指各种载人或载物的机动车,因此本文提到车联网主要是指“vehicle”。
世界卫生组织网站提供的数据显示,全世界每年因道路交通事故死亡的人数约有125万,相当于全球每天有3500人因交通事故死亡。数据显示,每年还有几千万人因此而受伤或致残。其中,交通事故是15~29岁年轻人的死亡原因。每天都有100多万户家庭因交通事故而失去亲人,这是很悲惨的事。
分析世界卫生组织安全事故报告后可以发现其中两大规律:一是在安全事故导致死亡的人群中,行人(22%)、摩托车驾驶者(23%)、骑自行车人员(4%)这3类人群的死亡人数占50%左右,而这些人恰恰是相对弱势的群体,因此智能网联汽车、无人驾驶的宗旨要保护的是处于交通环境中的弱势群体;二是在安全事故导致的死亡因素中,速行驶、不遵守交通信号灯规则、机动车和非机动车混合、酒驾为主要因素,速行驶是当前交通事故的顽疾,一名成年行人如果被时速低于50km/h的汽车碰撞,死亡几率在20%以下,但如果被时速为80km/h的汽车碰撞,死亡几率则为60%。而这些因素主要是人的因素而不是机器的因素,换句话说,如果汽车能代替人来做准确度更高的驾驶决策就会大量减少伤亡事故,这应该是智能网联汽车首先要考虑的因素。另外,在推动智能网联汽车技术、产业发展的过程中,在安全因素、技术因素、成本因素、政策因素等所有影响因素中,安全因素是*关键的,因此笔者认为车联网的研究应该以安全为出发点、以安全为研究主线、以安全为技术体系主线、以安全为测试主线、以安全为主要评价标准。
智能网联汽车的六层安全体系分析
目前国内外车联网领域存在两大体系,一种体系是基于单车智能、面向无人驾驶的演进体系,包括SAE(Society of Automotive Engineers,美国汽车工程师学会)的L0~L5层演进体系和NHTSA(National Highway Traffic Safety Administration,美国*公路交通安全管理局)的L0~L4层演进体系,后者的L4层其实包括了前者的L4和L5层,因此本质上是一致的。
另外一种技术体系是汽车工程师学会的智能网联汽车级别,包括智能级别和网联级别两条融合的技术线,国内的技术线认为只有单车智能还不够,还需要通过网联技术提升V2X实现车路协同(V2I)、车车协同(V2V)、车与行人协同(V2P)等,2016年汽车工程学会将智能化分级为驾驶辅助(DA)、部分自动驾驶(PA)、有条件自动驾驶(CA)、高度自动驾驶(HA)、完全自动驾驶(FA)。网联化分为3级,网联辅助信息交互、网联协同感知、网联协同决策与控制。
可以看出,无论是美国主导的单车智能式自动驾驶演进路线,还是的“智能+网联”无人驾驶演进路线都是基于技术层面的,而不是基于安全层面的,虽然实际测试、标准化过程中会有安全要素考虑,但是并没有将其提到核心的位置,这是当前国内外智能网联汽车发展的*标准化隐患。但是,笔者认为车辆本身是一个移动的物品,有动能、惯性、力量,是一种隐患点,正是这个原因,交通事故才会有伤亡,因此需要尝试从安全的角度分析技术体系。车联网环境下智能网联汽车安全保障体系可以分为L0~L5共六层,如表所示,每多1层系统就多一项可靠系数,*终实现智能网联汽车在行驶状态下5个9的安全可靠性——99.999%。
表 车联网环境下智能网联汽车L0~L5六层安全保障体系
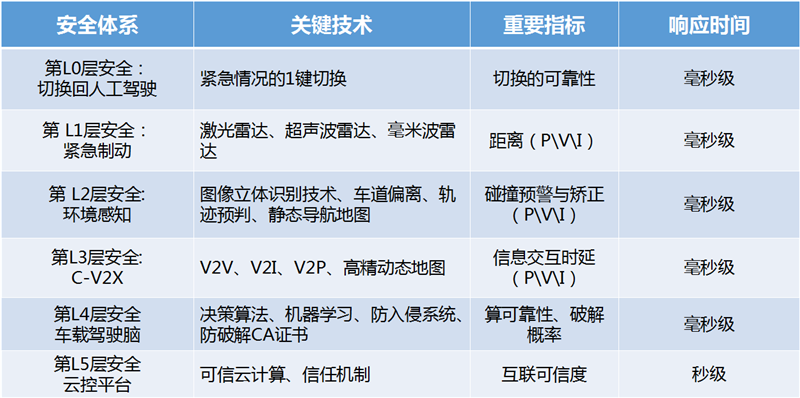
L0层安全:一键切回人工驾驶功能
无论是当前SAE L2层ADAS级别的自动驾驶阶段,还是未来完全的无人驾驶阶段,从SAE的L1~L5层级都存在一些安全隐患,出现了一些失控的局面,而当这种危害出现时,车辆内的人员和车辆外的环境都存在安全威胁。好莱坞电影《速度与激情8》中有一段这样的场景:上千辆汽车在黑客的远程操控下在街头狂奔,无论车里是否有人驾驶,如同《生化危机》中的丧尸一般狂奔、冲撞。类似这种场景,在未来的驾驶时代是要避免的。
未来的驾驶分两种情况,车上有驾驶员和无驾驶员,车上有驾驶员时可以实时切换回人工驾驶,车上无驾驶员时的静止状态应默认为人工驾驶状态,乘客上车后可开启无人驾驶状态。车联网通过IP网络接入公网,对于黑客来说是*典型的、*简单的网络防火墙攻击;黑客还可以通过OBD(车载诊断系统)端口进入车辆内部系统控制车辆;近场环境下还可以通过蓝牙和Wi-Fi网络进入车载系统。
未来的汽车应该能够实现一键硬切换,通过取消系统供电、切断“车载控制脑”信号的形式使车辆的控制权交回驾驶员,切换时间应该为毫秒级,进入人工驾驶为秒级;未来的车辆从有人驾驶到完全无人驾驶之间会有过渡阶段,过渡阶段的方向盘、脚刹和油门脚踏很可能是隐藏式的,后者全部集成到隐藏式方向盘上以力度传感器的形式出现,此时的方向盘也只是在紧急情况下得以使用,因此方向盘会比现在的方向盘做得小、简洁、隐蔽,紧急情况下从面板处可以开合,方向盘可以伸出。在平时方向盘是收起、隐藏的,以节省车内空间,让自动驾驶名副其实。
L1层安全:紧急制动
当前激光雷达、毫米波雷达等被视为无人驾驶的标配,但是以目前的制造水平来看,激光雷达属于高精密器械,还没有达到生产效率提升、商用化普及使可变成本降低的程度。固定成本偏高的主要原因是当前的调试技术主要靠*级的工程师,即主要靠人工来实现,尤其是随着雷达线速的提高,调测工作量呈现几何级增长,64线雷达价格昂贵,但8线则便宜很多,这是技术路线选择的问题。
当前64线的主流激光雷达价格达到50万元~70万元,而8线的激光雷达价格则可以便宜到64线价格的1/10以下。因为当前无人驾驶测试厂家使用的激光雷达是核心装备,但是频频发生事故,因此一辆20万元的家用轿车再配备大于车辆本身价格几倍的智能装备显然是不现实的,虽然当前是实验阶段,但是类似谷歌、亚马逊、微软等厂家对无人驾驶已经过于乐观了,高昂的激光雷达成本完全可以分摊到V2X、图像识别、高精动图等其它安全技术中去。
低配的激光雷达与毫米波雷达、声波雷达三者各有所长,感应距离、天气环境适应性各不相同,但是本质上他们都是用来测距的,测距的目的是配合车速计算刹车距离、刹车时间,以实现紧急制动。当前声波雷达已是家用轿车的标配;而毫米波雷达价格一般在1000元左右的量级,测试距离可以达到200m,可以完全实现高速公路上安全跟车距离内的测距、刹车提醒保障;激光雷达的特长是精度比毫米波雷达高,可以360度测距,而且可以环境建模(其实放在无人驾驶上大材小用)。当车辆的行驶方向距离物体达到安全刹车距离时,车辆应该能够紧急制动,并能通过车速和距离确定刹车的幅度,当车速在120km/h时,刹车距离在100m以上,在城市道路以40km/h的速度行驶时,刹车距离应该控制在15米以上,如果配合L3级别的V2I路面湿滑等天气提醒,可以动态调整刹车距离。
L2层安全:环境感知
当前,对环境的感知是无人驾驶的痛点、难点,如果放在智能网联汽车体系内,那么难度可以大大降低。环境感知包括对周边环境的图像识别、物体识别、车道偏离、周边机动车与行人的移动轨迹速度预判等,核心是识别出车的位置、周边物体的位置,它需要L1层雷达技术提供数据,同时可以通过L3层的V2X反馈确定危险等级和碰撞概率并保持安全距离,目的是使车辆始终处于一种相对安全的位置。例如利用图像识别、激光雷达、静态导航地图,当车辆偏离行驶轨迹、离路面过近、通过狭窄桥面、通过狭窄的山道时,车辆会始终保持在合理的速度和安全位置。
静态导航是目前依靠移动互联网和全球卫星定位系统形成的2D为主的导航技术,由L1层的雷达环境感应以及L2层的图像立体识别和静态导航为L3层的高精动态地图打下基础。
L3层安全:定位
C-V2X是国际上无人驾驶两条技术路线的核心差别:单车智能和网联智能。C-V2X是网联智能的核心观点,当前以谷歌、亚马逊、微软等企业实验的无人驾驶多为利用上述安全层次中L1/L2层内的技术,试图通过人工智能技术直接实现无人驾驶。
但是经过深度分析,社会的发展是不可能直接从工业经济跳跃到智能经济(人工智能为主导的技术经济)的,中间必然要经历数字经济的阶段。而数字经济要经过数字化、互联网&物联网、数字孪生三大阶段,C2X技术的核心理念是互联网&物联网,数字孪生为高精动态地图,就是将地理环境、车辆的行驶映射在数字环境中,并可以通过L3层技术实现车辆之间的信息本地共享、云端共享,配合北斗地基增强技术可以显示出车辆的立体准确位置、旁观者视角的行驶场景,误差可以不过1cm。车路协同(V2I)、车车协同(V2V)、车与行人协同(V2P)等V2X技术可以互相告知对方自己的位置和速度,根本目的也是为了在区域环境内定位,包括当前位置和即将移动位置。
L4层安全:车载驾驶脑
车载驾驶脑是人工智能技术在无人驾驶中的真正应用。车载驾驶脑就是一个虚拟司机,逐层上报上来的L1~L3级别的数据在车载驾驶脑中进行综合判断、快速决策,并将相关数据有选择的上报L4级别,L4级别提供系统升级服务、驾驶参考数据服务。车载驾驶脑在本地状态下是车辆行驶的*“指挥官”,是人类命令的*“执行官”。
如果说人工智能发展有人工智能、通用人工智能、级人工智能3个阶段,那么车载驾驶脑特指人工智能,但是不排除未来发展成通用人工智能、级人工智能,甚至在级机器人阶段像“变形金刚”一样可以在机动车和人形机器人之间进行切换。
智能网联汽车将是5G、云计算、物联网、人工智能、IC芯片等技术集中爆发的行业,而且产业的带动性强、跨行业通用性强,车载驾驶脑在无人驾驶领域逐步成熟的同时也可以广泛应用于仓储物流、矿产开采、加工制造、建筑工程等诸多领域。
L5层安全:可信云计算、信任机制
这一层的安全机制是基于公共服务云平台、私有业务云平台、交通管理平台等,通过云平台,车辆可以实现优化道路路径、实时接收交通网络状态信息、交通效率引导、共享汽车服务、商家服务等,实现网联化基础上的*有效率模型,包括*路径规划、公共政策提醒、车辆出行提醒、车辆保险管理、车辆保养管理等。汽车作为交通工具不仅有财产属性,还有社会属性,尤其是在共享经济时代,无人驾驶汽车不仅可以作为出行工具,还可以作为投资于交通工具的增值工具,比如通过可信云计算实现车辆在无人驾驶状态下的运送货物、运送网约乘客等行为,无人驾驶车辆的拥有者可以远程指挥车辆网约车接单。
L0~L5层的安全机制,由于从L0~L5层之间是技术不断演进的过程,L1~L5层之间可以互相协同校准以提高可靠性,从某种程度上来说,各层感知的距离、速度、角度有可能是重叠的,但是经过比对、互补校准后,安全性得以提高。
从L0到L5层技术成熟度是不断减弱的,因此从L0到L5这个方向,当下一层不安全时系统主动释放控制权,实现L5-L4-L3-L2-L1-L0逐层释放,以及由驾驶人员一键切换回手动驾驶,这样一种机制,无论是从研发角度、商用化的角度都可以形成一套闭环的安全机制。如图所示,车联网环境下智能网联汽车的安全体系技术架构图中处于优先级别的,应该是人类对驾驶的控制权、对环境感知的紧急制动能力,例如在黑客攻击的情况下,车辆被控制欲故意制造交通事故,但是在安全刹车距离范围内,车辆应该能够不执行车载驾驶脑的命令而实施主动刹车,因为这是仅次于人类控制权的优先控制权,基于此就不会出现上文提到的电影《速度与激情8》中出现的“僵尸车”互相碰撞、被控制故意撞击警车的行为。
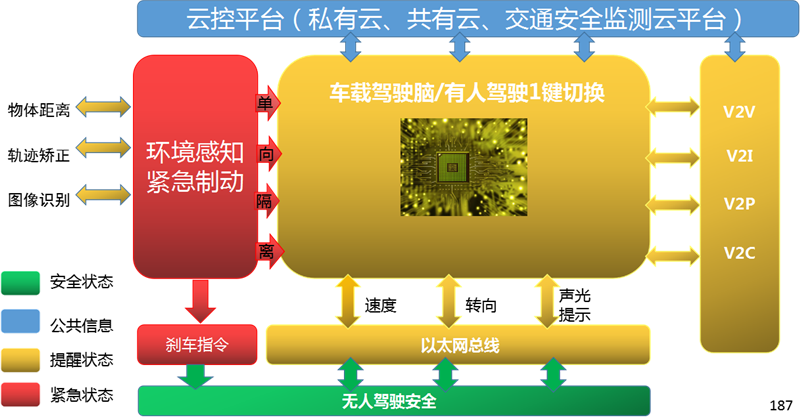
图 车联网环境下智能网联汽车的安全体系技术架构
结
车联网行业整体发展、智能网联汽车技术的演进都应以技术安全、服务安全为主线。在L0~L5演进的过程中,汽车安全技术也会逐步地升级换代,每一级测试可靠性达到99.999%则可以投入商用,逐步地实现无人驾驶,提高车辆行驶状态下的安全可靠性,无限趋近于人类对道路交通事故零伤亡的期待。如果每年能挽救125万人类生命和125万个家庭,那么不断的投资和技术研发都是值得的。

关注本网官方微信公众号 随时阅读专业资讯

征稿邮箱:info@testmart.cn 
版权与免责声明
爆品推荐
会员服务热线:010-62681193
展会合作/友情链接:010-62681114







 京公网安备 11010802023672号
京公网安备 11010802023672号
网友推荐新闻: